終了しました
第138回テクノラボツアー ロボット、ちょっとAI、大阪公立大学の描く未来
- 2023年9月28日(木)13:30~18:30(申込締切2023年9月22日)
- 対面:大阪公立大学I-siteなんば/リモート形式:Zoom
大阪公立大学産官学共同研究会では、ほぼ隔月の頻度でテクノラボツアーを開催しています。今回は、対面式とリモート形式の参加が選択可能なハイブリッド形式にて開催します。
ロボットとAI(人工知能)は、独立して存在する技術ですが、aibo(ソニー、ペットロボット)やPepper(ソフトバンク、コミュニケーションロボット)のようにロボットにAIが搭載されることは当たり前になっています。AIは人工知能を意味し、強化学習などの機械学習や自然言語処理などの技術を使い、人間のような知能を実現するものです。一方、ロボットは人間の代わりに作業を行うための機械装置ですが、AIを搭載したロボットは、より高度な作業を行うことができるようになります。
今回のテクノラボツアーでは、(株)国際電気通信基礎技術研究所より内部英治主幹研究員をお招きし、AI研究の最新動向を、大阪公立大学大学院工学研究科の講師陣からロボットに関する最新の研究を紹介させて頂きます。「ロボットとAIの現在と未来」を知るため、最新の研究結果・動向を分野外の方にもご理解頂けるようご紹介します。皆様のご参加をお待ちしています。
| 日時 | 2023年9月28日(木) 13:30~18:30 (懇親会、17:20~18:30) |
|---|---|
| 開催方法 |
対面式(会場:l-siteなんば)およびZoomによるWEB開催 |
| 対面式会場 |
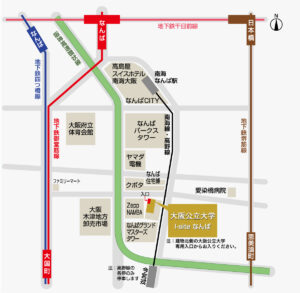
大阪公立大学 l-siteなんば (住所)大阪市浪速区敷津東2-1-41 https://www.omu.ac.jp/isite/access/ |
| 主催 |
大阪公立大学産官学共同研究会、大阪公立大学大学院工学研究科 りそなグループ(りそな銀行、関西みらい銀行、りそな中小企業振興財団) |
| 協力 | 大阪公立大学学術研究推進本部・URAセンター、大阪商工会議所、堺商工会議所 |
プログラム
| 13:00~13:30 | 受付 (参加コード送付者のみ) |
|---|---|
|
13:30~13:45 |
主催者挨拶
古川裕二 りそな中小企業振興財団 理事長
浜本 幹 大阪公務部長 りそな銀行
片山 徹 副会長 大阪公立大学産官学共同研究会/教授 大阪公立大学工学研究科
|
| 13:45~14:20 |
招待講演 『強化学習のこれまでとこれから』 内部 英治 主幹研究員 株式会社国際電気通信基礎技術研究所(ATR) 【講演概要】強化学習とは試行錯誤しながら制御則を学習する人工知能の一分野で、話題の ChatGPT や囲碁の世界王者に勝利したアルファ碁などでも用いられています。また人や動物の意思決定の数理モデルとしても研究されています。その一方でロボットなど物理システムの制御に強化学習を応用するためには様々な困難があります。本講演では強化学習のこれまでを振り返りつつ,実社会への応用に向けた取り組みを我々の成果も含めて紹介します。 |
|
14:20~14:55 |
講演Ⅰ 『磁石車輪式橋梁検査ロボットのフランジ部走破技術』 高田 洋吾 工学研究科機械系専攻 教授 【講演概要】建設から 50 年以上経つ老朽橋の増加に伴い、その検査に関して、ロボットを活用することに期待が寄せられています。この講演では、現在開発中の磁石車輪式橋梁検査ロボットについて述べます。橋梁下部は剛性を高めるために、複雑な鋼構造物として作られていて、そこがロボットの走行路にもなります。しかし、鋼板が横に突き出た部分(フランジ部)がロボットの走行を妨げます。今回、そのフランジ部を簡単に走破できるロボットを開発しましたので、特にそのことについて述べます。 |
| 14:55~15:30 |
講演Ⅱ 『屋外自律移動ロボットのナビゲーション技術』 田窪 朋仁 工学研究科電気電子系専攻 教授 【講演概要】人の往来する歩道などの環境でロボットが自律的に走行する技術が注目されています。本講演では、自律移動ロボットが屋外環境を走行する際に構築する地図生成技術と、生成された地図上の走行経路を導出する技術について紹介します。また,中之島公園周辺で毎年実施している大阪市域屋外自律移動ロボット実証実験事業「中之島ロボットチャレンジ」について紹介します。 |
| 15:30~15:45 | 休 憩 |
|
15:45~16:20 |
講演Ⅲ 『環境の変化に応じて適切な運動を選択できるヘビ型ロボットの制御手法の構築』 山野 彰夫 工学研究科航空宇宙海洋系専攻 助教 【講演概要】ヘビ型ロボットは、車輪型の移動機構では移動できないような災害現場や惑星探査用途などの不整地を走行するロボットとして注目されています。しかし、これまでのヘビ型ロボットの研究では、多数のアクチュエータを駆動させることによる消費電力の課題は依然として残されています。本講演では,本研究で提案したうねり運動の設計や形態変形の導入により移動効率を向上させる手法についてご紹介します。 |
|
16:20~16:55 |
講演Ⅲ 『自律型海中ロボットの研究開発』 有馬 正和 工学研究科航空宇宙海洋系専攻 教授 【講演概要】本年 4 月 28 日に閣議決定された第 4 期『海洋基本計画』では、「総合的な海洋の安全保障」と「持続可能な海洋の構築」が基本的方針として掲げられています。そこでは、海洋資源開発の推進や海洋科学技術の振興、海洋環境の保全・再生・維持の重要性が指摘されています。本講演では、海洋の研究開発で重要な役割を果たしている自律型海中ロボットの研究開発動向とともに、本学で開発が進められているグライダー型海中ロボットを紹介します。 |
| 16:55~17:10 | 終了(挨拶、案内) |
| 17:20~18:30 | 懇親会 |
参加費・申込方法
| 申込方法 |
|
|---|---|
| 参加費 |
無料 |
| 申込締切 |
2023年9月22日(金) |
| 注意事項 |
|
|
アンケート回答の お願い |
ツアーの感想、要望、ご質問、講演者への技術相談、産学技術連携のご要望をご記載下さい。 |
| 禁止事項 | 録画・録音・撮影はご遠慮願います。 |
| 問合せ先 |
大阪公立大学大学院工学研究科 工学支援事務室内 [at]を@に変更してください。 |
| アクセス |
大阪公立大学I-siteなんば 〒556-0012 大阪市浪速区敷津東2-1-41
【南海電鉄ご利用の場合 】 ●南海本線 「なんば」駅 中央出口下車南へ約800m、徒歩約12分 ●南海高野線 「今宮戎」駅 下車北へ約420m 徒歩約6分 【大阪メトロご利用の場合】 ●大阪メトロ御堂筋線 「なんば」駅5号出口下車南へ1000m、徒歩約15分 ●大阪メトロ御堂筋線・四つ橋線 「大国町」駅1番出口下車東へ約450m、徒歩約7分 ●大阪メトロ堺筋線 「恵美須町」駅1-B出口下車西へ約450m、徒歩約7分 ※本施設には、駐車場・駐輪場はございません。公共交通機関もしくは周辺のコインパーキングをご利用ください。 |